Enzo Coquelle
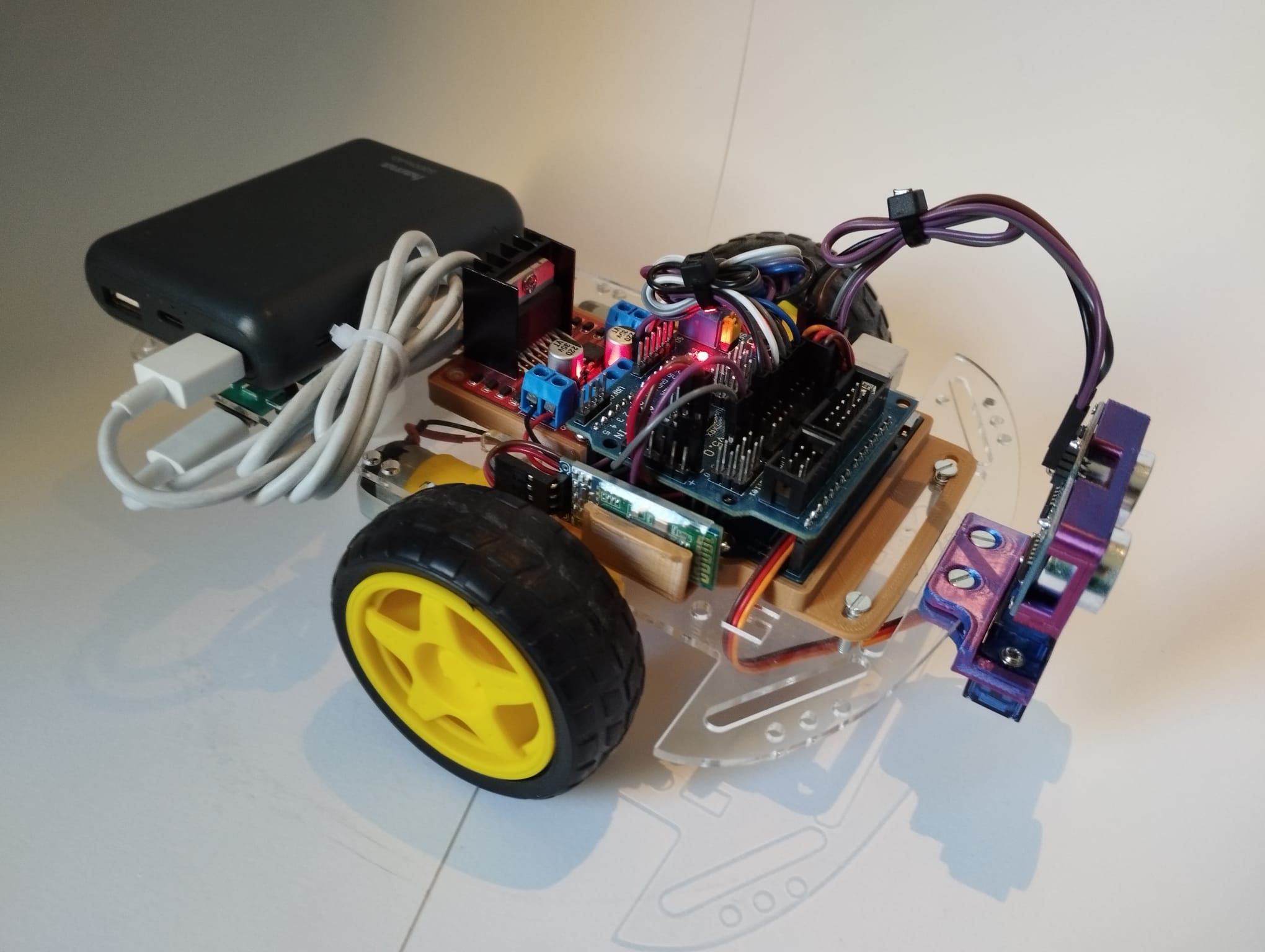
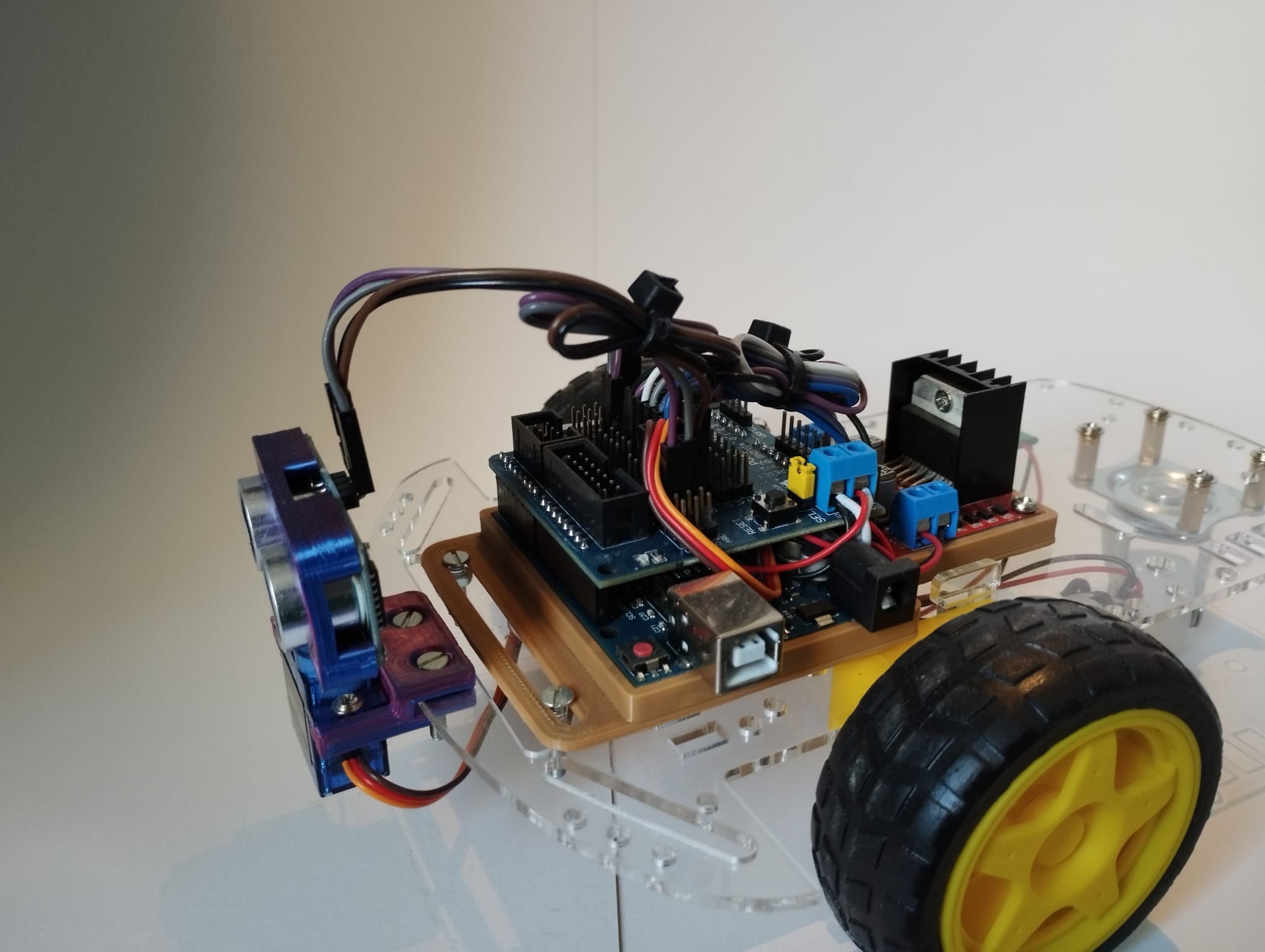
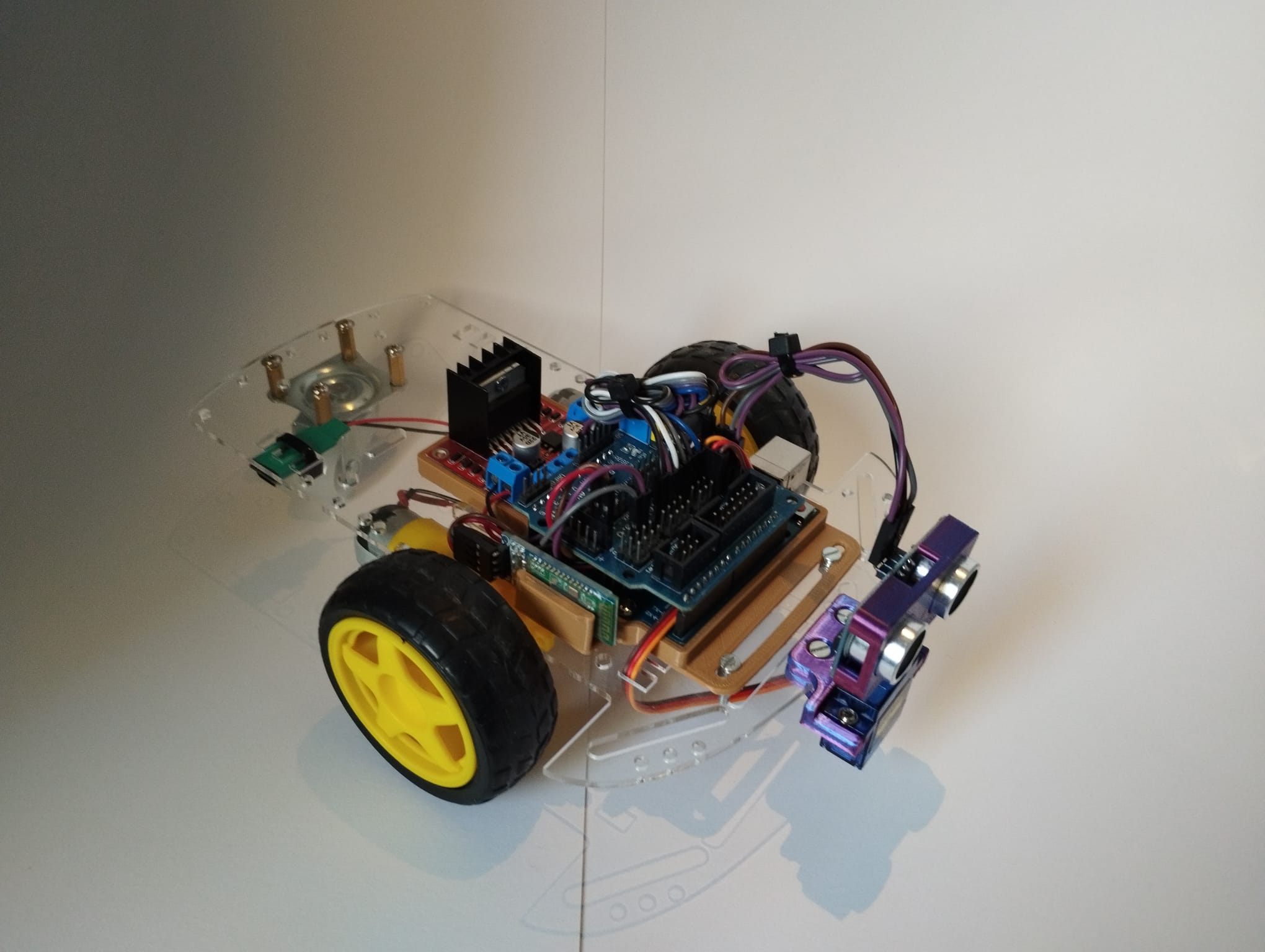
@ZoliexCette voiture est capable de se déplacer dans un environnement clos, à l'aide de son capteur de distance HC-SR04 et son servomoteur.
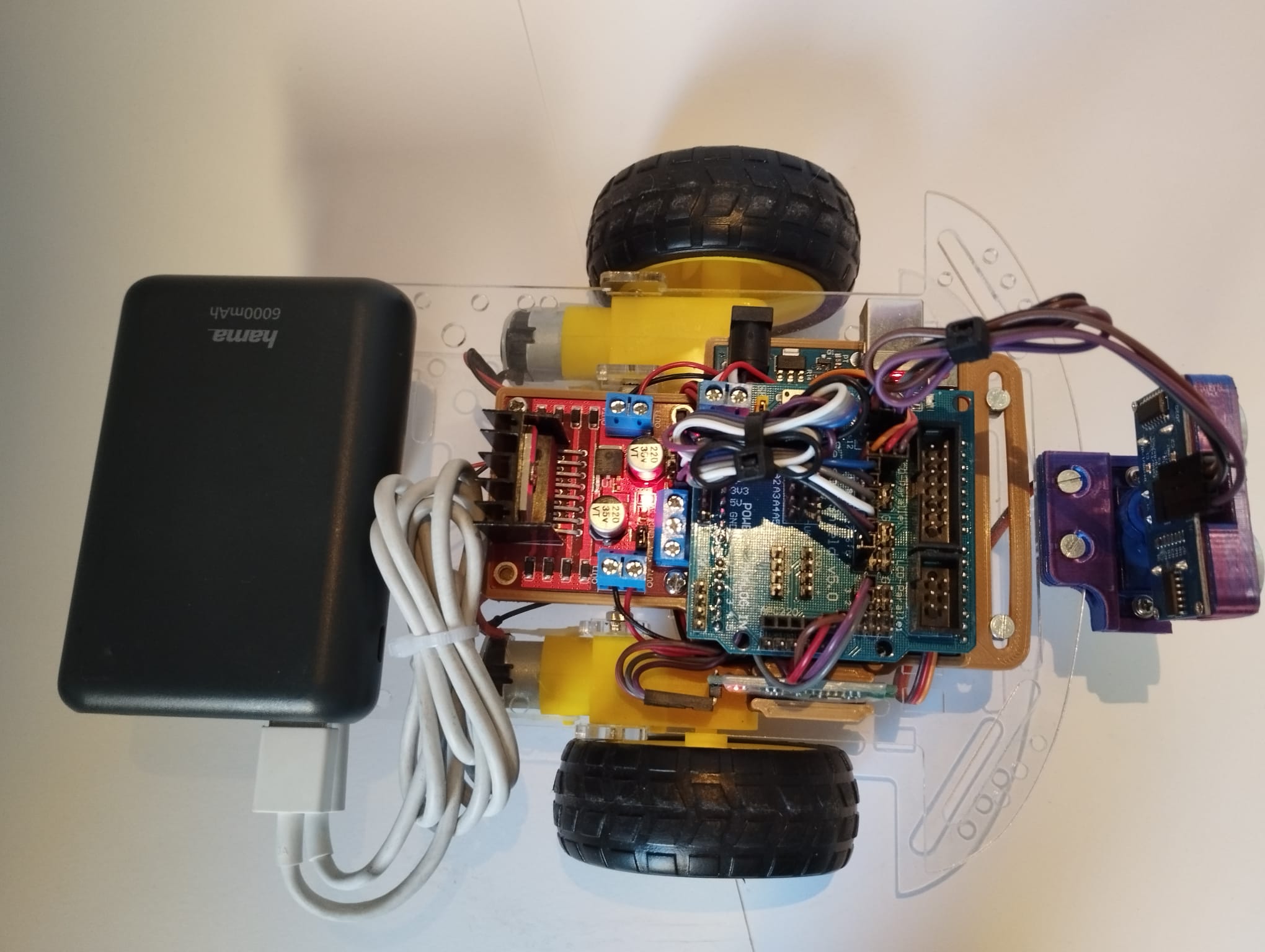
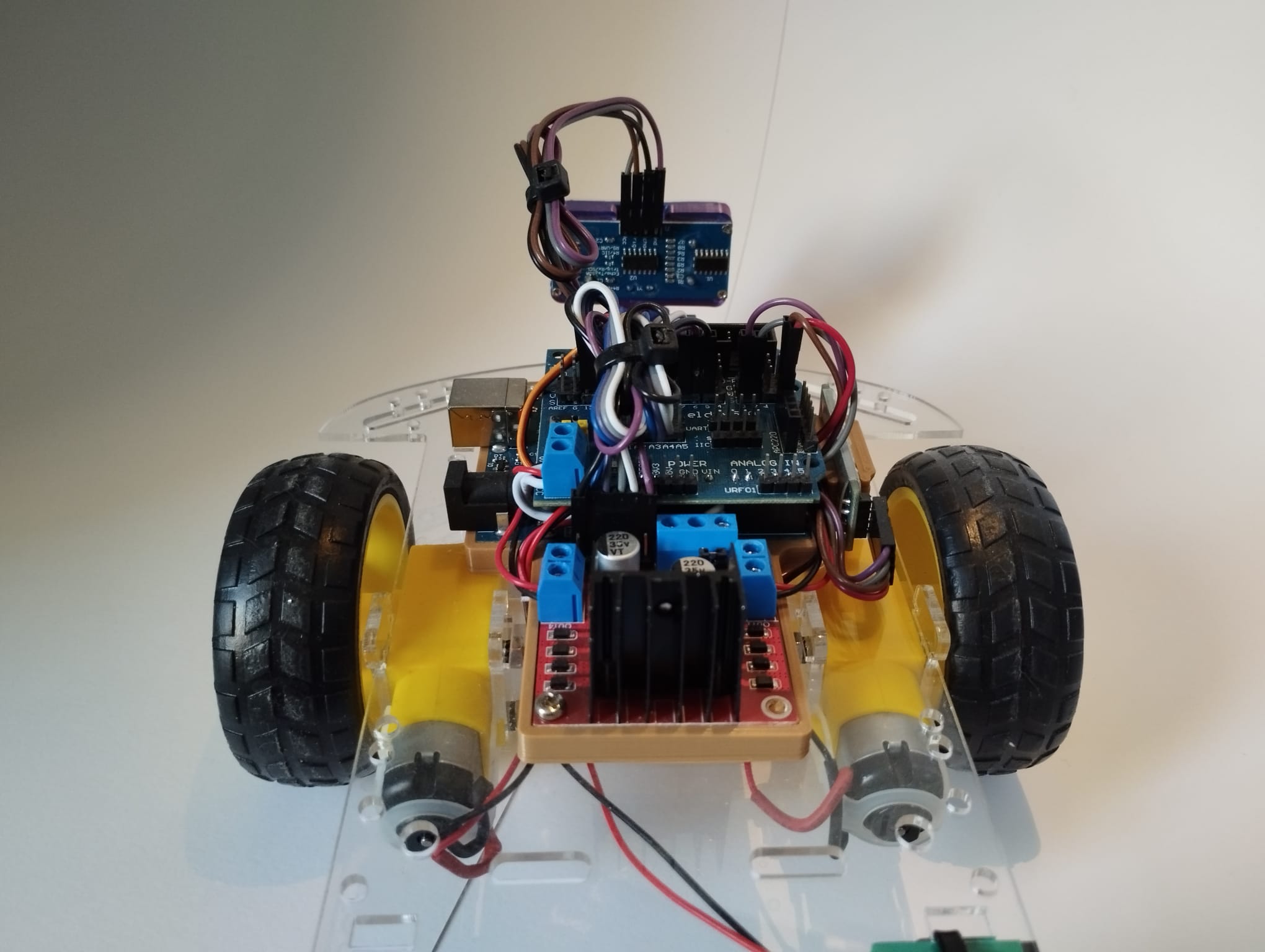
Elle est composée : d'un module bluetooth HC-SR06, d'un arduino uno, d'un capteur HC-SR04 (capteur de distance à ultrasons), d'un servomoteur de deux moteurs et d'un contrôleur pour les moteurs (L298N).
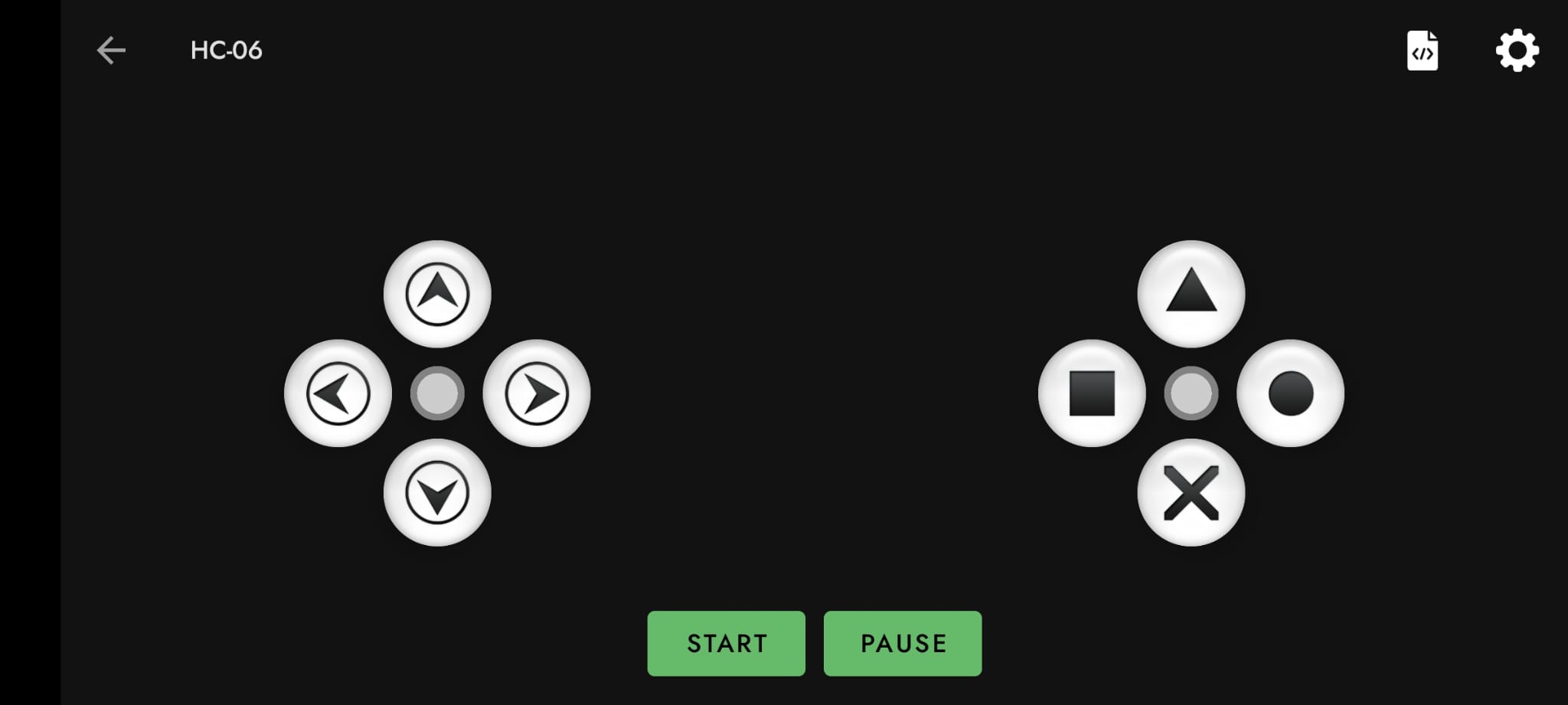
Son fonctionnement est simple : Pour contrôler la voiture, il faut télécharger l'appli "Arduino Bluetooth controller", on peut ensuite se servir de la voiture. Elle possède deux modes de fonctionnement, un mode manuel, où l'on peut contrôler sa direction, et un mode automatique, qui lui permet de se déplacer de manière automatisée, grâce à son capteur de distance.
J'ai entièrement conçu cette voiture, de la phase de choix des composants, à la programmation en passant par la modélisation de pièces en 3D ou encore le câblage des composants.
Le code est disponible à la page suivante :